
ボイスコイルモータ制御例
ボイスコイルモータ(VCM)の微少推力制御
この商品で実現できます

ボイスコイルモータ(VCM)
<改善のポイント>
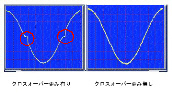
電流ループを構成する出力段の出力方式によって、左図に示されるようにゼロクロスのところで、クロスオーバー歪みが発生する方式
電流ループを構成する出力段の出力方式によって、左図に示されるようにゼロクロスのところで、クロスオーバー歪みが発生する方式
ボイスコイルモータ(VCM)の電流精密制御(トルク制御)
この商品で実現できます

ボイスコイルモータ(VCM)
<改善のポイント>
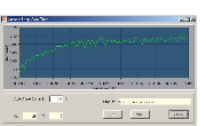
サーボ系の電流ループ応答性は、負荷インダクタンスに依存する。(速度、位置ループは負荷に無関係)
従って、負荷インダクタンス
サーボ系の電流ループ応答性は、負荷インダクタンスに依存する。(速度、位置ループは負荷に無関係)
従って、負荷インダクタンス
ボイスコイルモータ(VCM)の位置制御
この商品で実現できます

ボイスコイルモータ(VCM)
<改善のポイント>
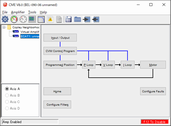
VCMの位置制御を行うために、VCMのフィードバックとして、リニアスケールなどの位置センサを取り付ける必要がある。
そのフ
VCMの位置制御を行うために、VCMのフィードバックとして、リニアスケールなどの位置センサを取り付ける必要がある。
そのフ
Copyright(C) 2006 Aoyama Special Steel Co.,Ltd. all rights reserved.