
精密ガントリー・ステージの角度誤差の補正
サーボコントローラの仕様
型番: SPiiPlus CM
出力: 10A連続、20Aピーク
電源: 100~230VAC使用
オプション:
①ガントリアルゴリズム
②インプットシェーピング
③FRFアナライザ
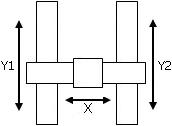
左図に於いて、Y1とY2がガントリシステムを構成、X軸テーブル
の位置を中心に固定して、ガントリ軸を動かしたとき、角度の
変位差がどの程度出るかを測定した。
実際の運転ではテーブルは移動するが同様の成果が得られる。
その時の条件では、某社コントローラに対し、速度は1.5倍以上、加減速時間は約2倍での解析となっております。
結果:
SPiiPlus CMと某社コントローラのYAW制御誤差を比較したところ、SPiiPlus CMは半分以下に治まるという、優れた能力を示した。
型番: SPiiPlus CM
出力: 10A連続、20Aピーク
電源: 100~230VAC使用
オプション:
①ガントリアルゴリズム
②インプットシェーピング
③FRFアナライザ
左図に於いて、Y1とY2がガントリシステムを構成、X軸テーブル
の位置を中心に固定して、ガントリ軸を動かしたとき、角度の
変位差がどの程度出るかを測定した。
実際の運転ではテーブルは移動するが同様の成果が得られる。
その時の条件では、某社コントローラに対し、速度は1.5倍以上、加減速時間は約2倍での解析となっております。
結果:
SPiiPlus CMと某社コントローラのYAW制御誤差を比較したところ、SPiiPlus CMは半分以下に治まるという、優れた能力を示した。
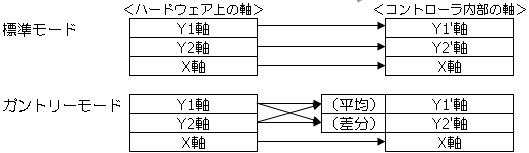
ACS Motioncontrol社のガントリアルゴリズムは一般的な2軸のマスタ/スレーブ構成をとる方式とは異なっている。
Y1軸とY2軸を独立した2つの軸として片方をマスタ軸、もう片方をスレーブ軸にするのではなく、
Y1軸とY2軸の平均位置を重心軸として軸1に割り当て、それらの位置の差分を軸2に割り当てる
方式をとっている。
<標準のマスタ/スレーブモード>
MFLAGS0.31=0と言う命令でY1軸1とY2軸は各々Y1'軸とY2'軸に割り当てられる。
<ガントリーモード>
MFLAGS0.31=1と言う命令でY1とY2の平均はY1'軸に、またY1とY2の差分はY2'軸に割り当てられる。このとき、X軸の位置によりY1'とY2'へはその重みが割り振られる。
マスタ/スレーブ方式は2つの軸が干渉し合い、制御上、支障が発生する。
それに対してガントリモードにおける、重心軸/差分軸の考え方はお互いのデータの受け渡しはあるが、お互いが干渉するような構成にはなっていない。
従って、制御が簡潔で、今回のようなYAW制御での精度の高さなどが求められる場合、良い結果を出すことが可能になる。
YAW制御の精度の問題だけでなく、共振の問題やその他の点でも優位な展開が可能である。
Y1軸とY2軸を独立した2つの軸として片方をマスタ軸、もう片方をスレーブ軸にするのではなく、
Y1軸とY2軸の平均位置を重心軸として軸1に割り当て、それらの位置の差分を軸2に割り当てる
方式をとっている。
<標準のマスタ/スレーブモード>
MFLAGS0.31=0と言う命令でY1軸1とY2軸は各々Y1'軸とY2'軸に割り当てられる。
<ガントリーモード>
MFLAGS0.31=1と言う命令でY1とY2の平均はY1'軸に、またY1とY2の差分はY2'軸に割り当てられる。このとき、X軸の位置によりY1'とY2'へはその重みが割り振られる。
マスタ/スレーブ方式は2つの軸が干渉し合い、制御上、支障が発生する。
それに対してガントリモードにおける、重心軸/差分軸の考え方はお互いのデータの受け渡しはあるが、お互いが干渉するような構成にはなっていない。
従って、制御が簡潔で、今回のようなYAW制御での精度の高さなどが求められる場合、良い結果を出すことが可能になる。
YAW制御の精度の問題だけでなく、共振の問題やその他の点でも優位な展開が可能である。
この商品で実現できます!



Copyright(C) 2006 Aoyama Special Steel Co.,Ltd. all rights reserved.