
ボイスコイルモータ制御例
ボイスコイルモータ(VCM)の電流精密制御(トルク制御)
サーボ系の電流ループ応答性は、負荷インダクタンスに依存する。(速度、位置ループは負荷に無関係)
従って、負荷インダクタンスに対応した電流ループパラメータの調整を行わなければならない。
このパラメータの調整いかんによって、アンプの応答性や直線性などの重要な特性が決定され、最終的にボイスコイルモータの電流制御を精密に行うことができる。
従って、負荷インダクタンスに対応した電流ループパラメータの調整を行わなければならない。
このパラメータの調整いかんによって、アンプの応答性や直線性などの重要な特性が決定され、最終的にボイスコイルモータの電流制御を精密に行うことができる。
CME 2の設定とオートチューニング
CME 2の画面上でモータのブロックをクリックするとモータの設定画面が表示される。
ここでモータのパラメータをファイルから読み込むか、マニュアルで設定する。
設定するパラメータは下記の通りである。
モータのモータの可動部の重量、ピーク推力、連続推力、最高速度、推力定数、逆起電圧定数、コイル抵抗とインダクタンス
以上の設定をしてモータのブロックを閉じる。
各種の定数の計算をするかどうかを聞いてくるので、OKボタンを押して計算する。
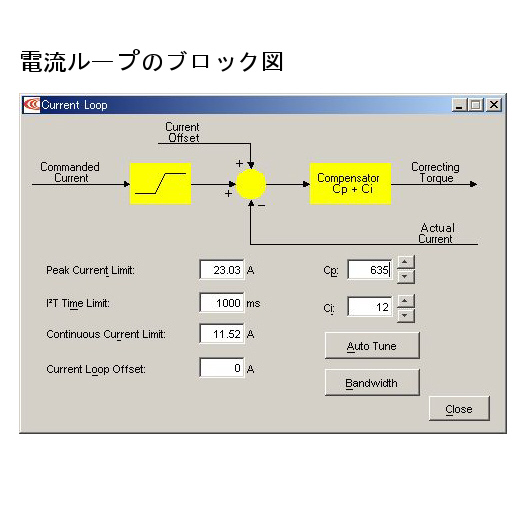
次に、I LOOPのブロックを開く。
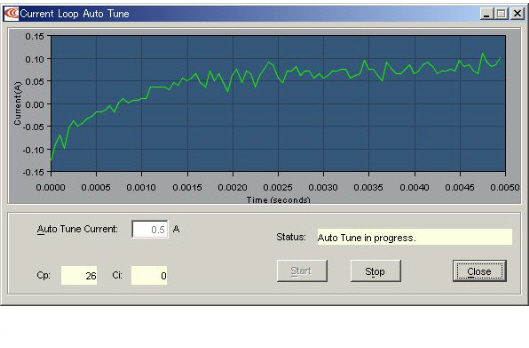
I LOOPのブロック内のAUTO TUNEボタンを押すと自動的に電流フィードバックに対する比例ゲイン及び積分ゲインを実電流を短時間パルスとして流して最適な数値を見つけ出す。
その後、Sin波を使用して応答周波数を測定する。
チューニングのセッティングをHigh(高速応答)、Midium(中速応答)かLow(低速応答)のいずれかを選択する。(制御目的により選択)
以上のことを行うことによりアンプのモータ負荷に対する最良の特性を実現できる。
ここでモータのパラメータをファイルから読み込むか、マニュアルで設定する。
設定するパラメータは下記の通りである。
モータのモータの可動部の重量、ピーク推力、連続推力、最高速度、推力定数、逆起電圧定数、コイル抵抗とインダクタンス
以上の設定をしてモータのブロックを閉じる。
各種の定数の計算をするかどうかを聞いてくるので、OKボタンを押して計算する。
次に、I LOOPのブロックを開く。
I LOOPのブロック内のAUTO TUNEボタンを押すと自動的に電流フィードバックに対する比例ゲイン及び積分ゲインを実電流を短時間パルスとして流して最適な数値を見つけ出す。
その後、Sin波を使用して応答周波数を測定する。
チューニングのセッティングをHigh(高速応答)、Midium(中速応答)かLow(低速応答)のいずれかを選択する。(制御目的により選択)
以上のことを行うことによりアンプのモータ負荷に対する最良の特性を実現できる。
この商品で実現できます!




Copyright(C) 2006 Aoyama Special Steel Co.,Ltd. all rights reserved.