
ボイスコイルモータ制御例
ボイスコイルモータ(VCM)の位置制御
VCMの位置制御を行うために、VCMのフィードバックとして、リニアスケールなどの位置センサを取り付ける必要がある。
そのフィードバックに基づいて、VCMの位置制御や速度制御が行われる。
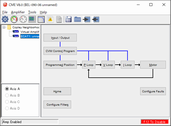
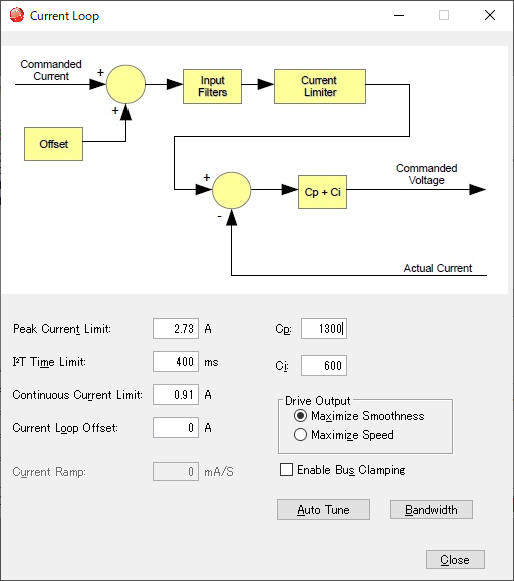
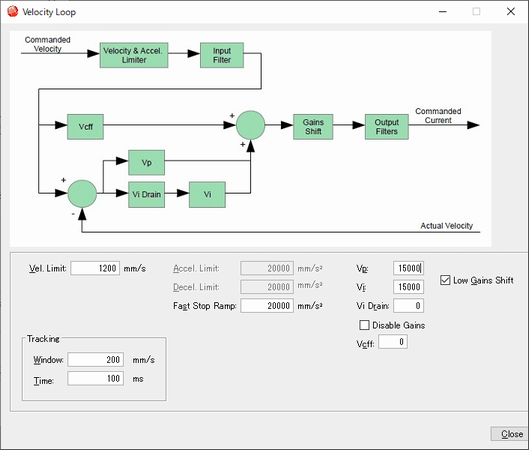
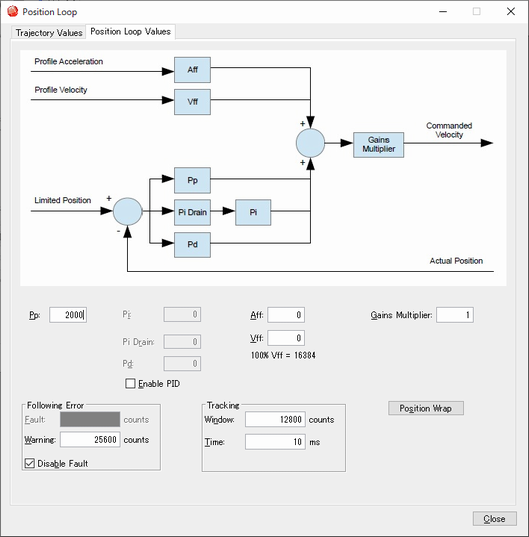
Copley社のサーボアンプは電流ループ、速度ループ及び位置ループの各種パラメータを設定でき、制御系の最適な調整ができる。
左の図はそのときの制御ループを示す。
そのフィードバックに基づいて、VCMの位置制御や速度制御が行われる。
Copley社のサーボアンプは電流ループ、速度ループ及び位置ループの各種パラメータを設定でき、制御系の最適な調整ができる。
左の図はそのときの制御ループを示す。
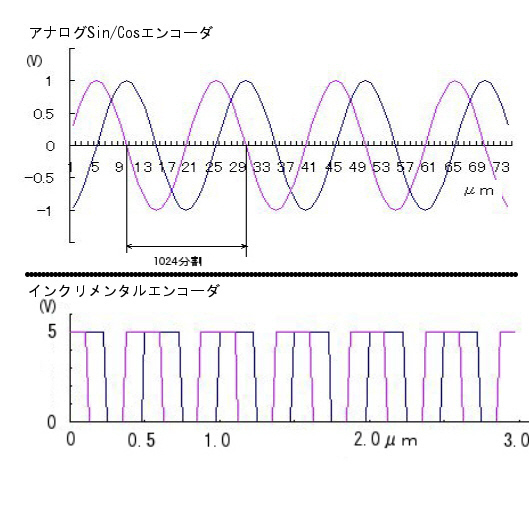
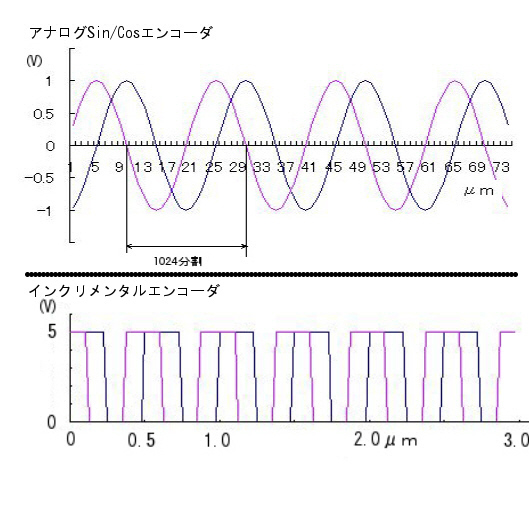
フィードバック信号としては、インクリメンタル・エンコーダのようなA、B、X信号のものが使用される。
また、アンプによっては、XenusやAccelnetなどのようにアナログSin/Cosエンコーダ(1Vp-p)信号も使用可能の物がある。
アナログSin/Cosエンコーダの分割数は最大1024に設定できるので、20μmのピッチのアナログエンコーダでは20nm、40μmのものでは40nmの分解能で制御できる。
また、アンプによっては、XenusやAccelnetなどのようにアナログSin/Cosエンコーダ(1Vp-p)信号も使用可能の物がある。
アナログSin/Cosエンコーダの分割数は最大1024に設定できるので、20μmのピッチのアナログエンコーダでは20nm、40μmのものでは40nmの分解能で制御できる。
フィードバック(エンコーダ)信号としては、デジタルインクリメンタルのA, B, X(Z)、アナログSin/Cos(1Vp-p)、アブソリュートなどが使用される。
アナログSin/Cosエンコーダの分割数は最大1024(Plusは4096)に設定できる。たとえば、Sin/Cos20μmピッチのアナログエンコーダで4ていばい後1024分割すれば分解能約5nmで制御できる。
アナログSin/Cosエンコーダの分割数は最大1024(Plusは4096)に設定できる。たとえば、Sin/Cos20μmピッチのアナログエンコーダで4ていばい後1024分割すれば分解能約5nmで制御できる。
この商品で実現できます!




Copyright(C) 2006 Aoyama Special Steel Co.,Ltd. all rights reserved.