
サーボドライバ制御例
ボールネジやギアのバックラッシュの影響を防ぐ制御
ボールネジやギアを使用したバックラッシュのある制御駆動系の精密制御を行なう為の手法を紹介します。
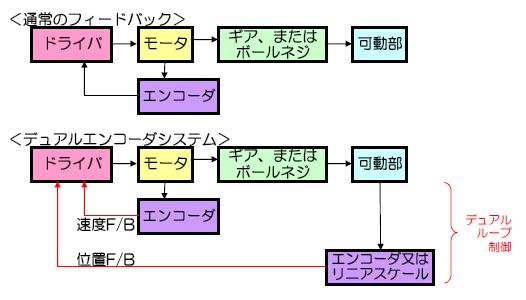
1軸に対し、2つのフィードバック系を取り込む制御構成である。このような構成を「デュアル・ループ制御」という。
1軸に対し、2つのフィードバック系を取り込む制御構成である。このような構成を「デュアル・ループ制御」という。
通常のボールネジやギアなどを使用したバックラッシュのある制御駆動系では、
回転モータ側のロータリエンコーダから位置フィードバック信号を読み取る。
しかしこれらの制御系では、バックラッシュなどの位置誤差要因は、位置精度の保証外として扱われる。
それに対し「デュアル・ループ制御」は、
・回転モータ側のロータリエンコーダ⇒速度制御専用
・駆動方向側のリニアスケール⇒位置制御専用
とし、同時に制御ドライバ(ボード)に取り込み演算する。
この演算によりバックラッシュなどによる位置ズレや時間遅れを補正する事が出来る。
この場合位置検出のリニアエンコーダは、アナログSin/Cosエンコーダを使用すると、より高精度な制御が可能だ。
回転モータ側のロータリエンコーダから位置フィードバック信号を読み取る。
しかしこれらの制御系では、バックラッシュなどの位置誤差要因は、位置精度の保証外として扱われる。
それに対し「デュアル・ループ制御」は、
・回転モータ側のロータリエンコーダ⇒速度制御専用
・駆動方向側のリニアスケール⇒位置制御専用
とし、同時に制御ドライバ(ボード)に取り込み演算する。
この演算によりバックラッシュなどによる位置ズレや時間遅れを補正する事が出来る。
この場合位置検出のリニアエンコーダは、アナログSin/Cosエンコーダを使用すると、より高精度な制御が可能だ。
この商品で実現できます!



Copyright(C) 2006 Aoyama Special Steel Co.,Ltd. all rights reserved.